HERCULES — Tele‑Robotic Ultrasound with Real‑Time Haptics
National news coverage and a peer‑reviewed feature in IEEE Access highlight a world‑first: safe, high‑fidelity remote ultrasound scanning validated in clinical trials.
Executive Summary
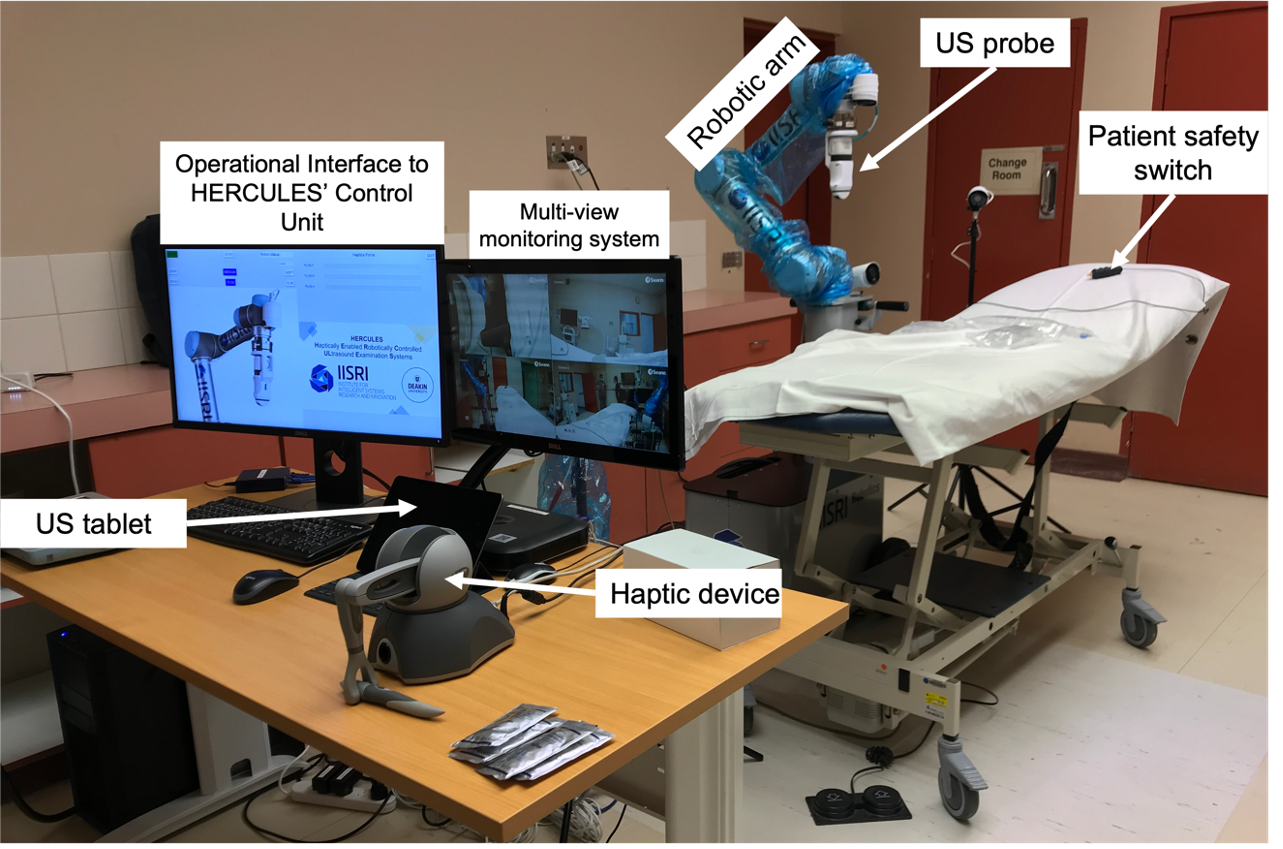
HERCULES is a haptically‑enabled, tele‑operated ultrasound platform designed to improve access to imaging while reducing musculoskeletal strain on clinicians. It delivers precise probe manipulation, realistic force feedback, and robust performance over real networks.
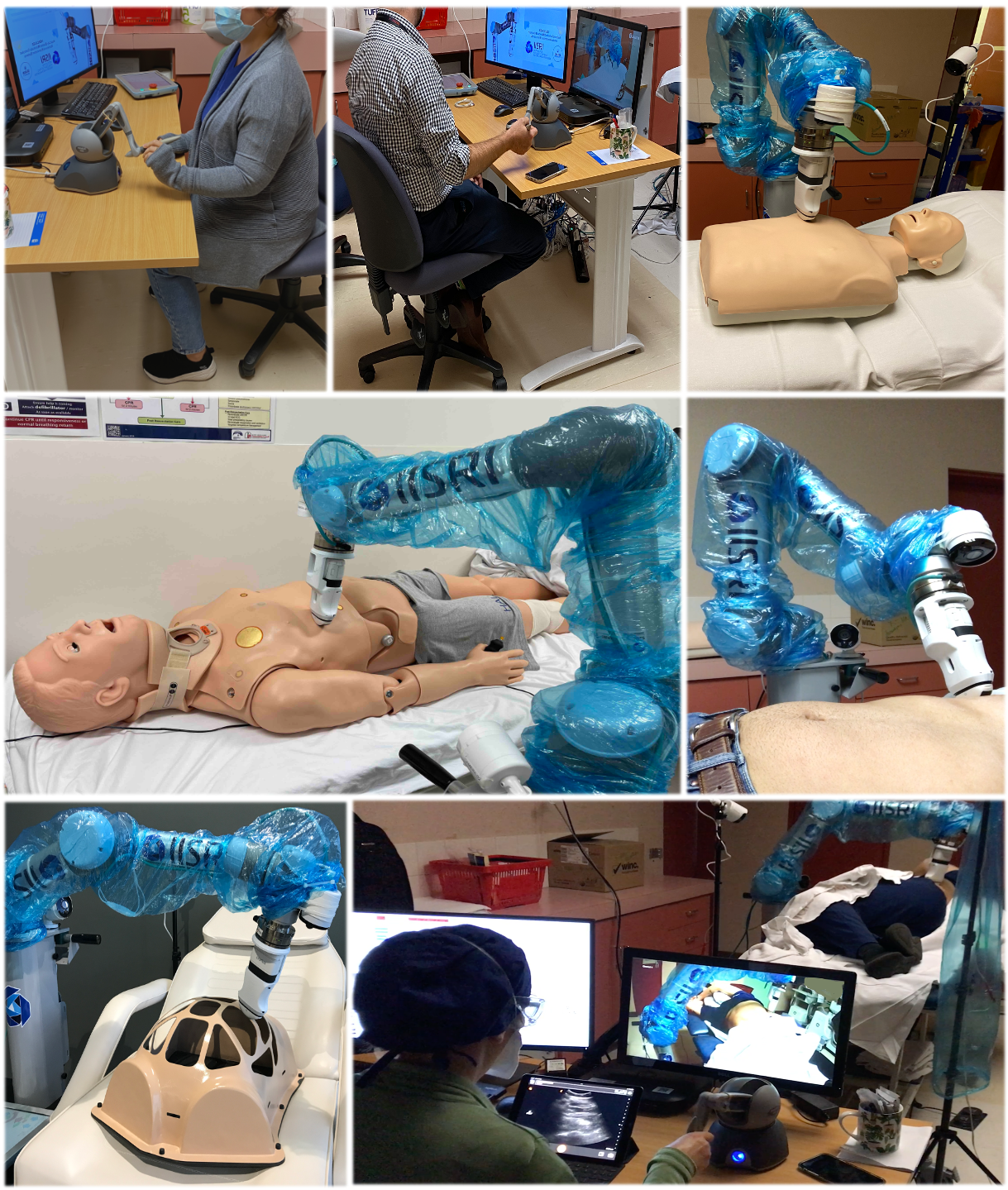
In clinical settings, remote scans matched the clarity and diagnostic value of manual scans, with enhanced operator ergonomics and built‑in patient safety mechanisms.
What you see in the video: A real clinical demonstration of remote ultrasound, where the operator controls probe motion and pressure via force‑feedback, maintaining diagnostic image quality without being physically in the room.
Project Highlights
A quick tour of the clinical impact and technology under the hood.
Clinical Trial Validation
Demonstrated diagnostic‑grade image quality during remote abdominal and chest scans in a real clinical environment.
Ergonomics & Safety
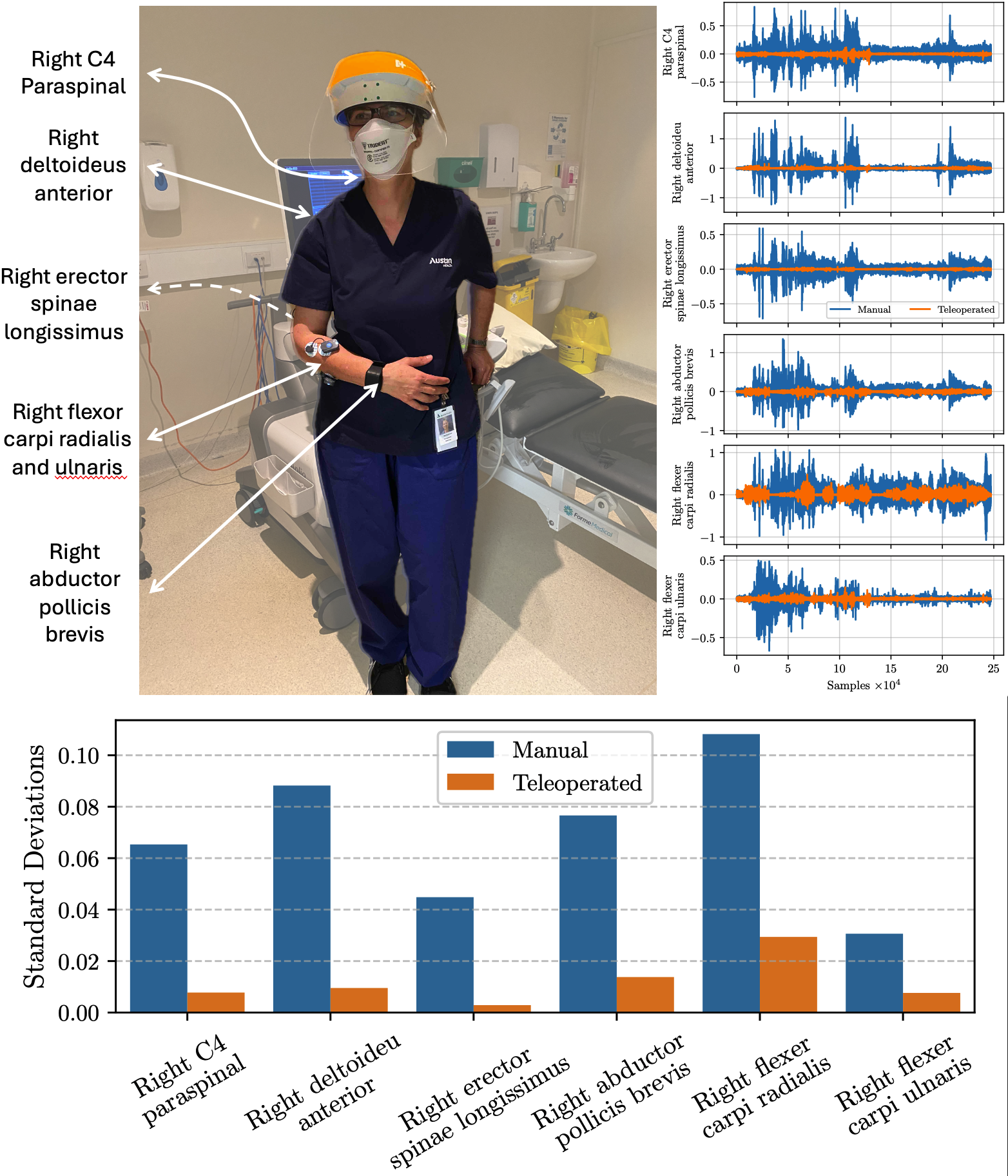
Force‑feedback control reduces operator strain; integrated e‑stop and safeguards ensure patient safety throughout procedures.
Network‑Robust Tele‑Operation
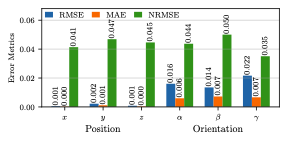
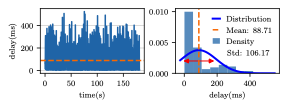
Stable, precise control of probe pose and pressure with perceptually smooth haptics over practical network conditions.
High‑Fidelity Haptics
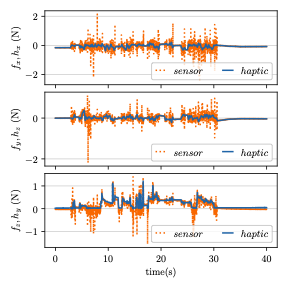
Realistic contact forces allow the operator to "feel" tissue interfaces remotely, improving placement and consistency.
Modular System Architecture
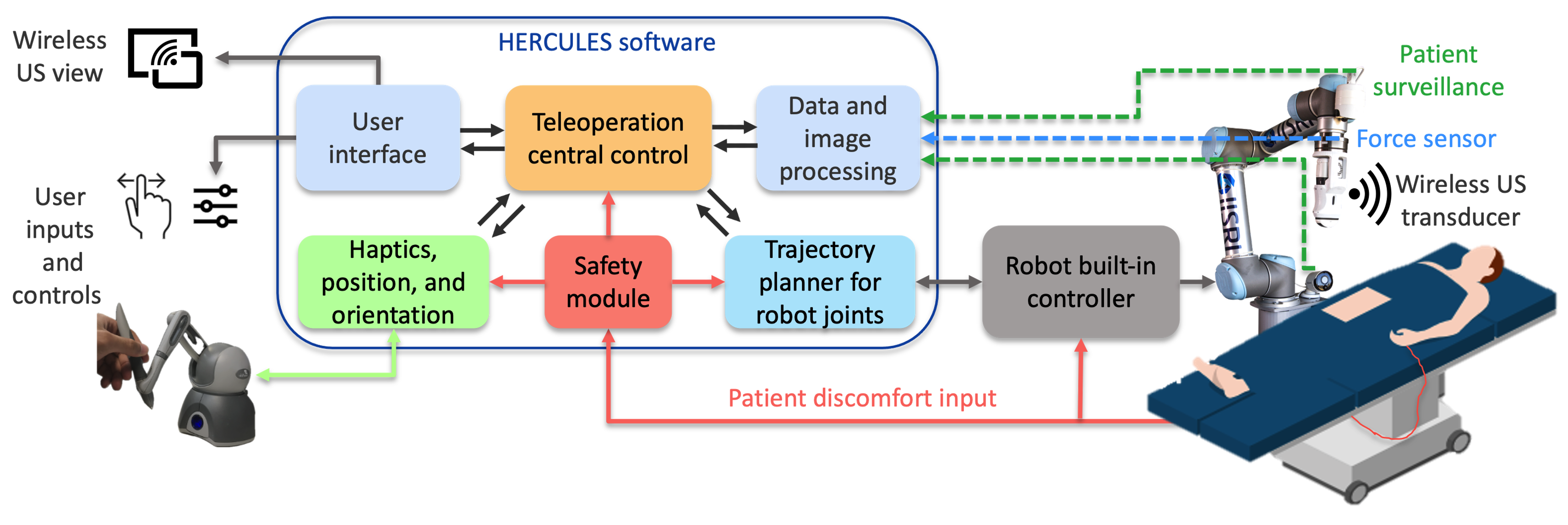
Decoupled subsystems (perception, control, safety, UI) enable rapid iteration and integration with clinical workflows.
Scalable Access to Care
Enables remote imaging in underserved settings while making ultrasound safer and more sustainable for clinicians.
Featured in IEEE Access
Peer‑reviewed coverage of the methods, clinical protocol, and outcomes.
HERCULES: Haptically‑Enabled Remotely Controlled Ultrasound Examination System
Abstract: We present a tele‑robotic ultrasound platform with real‑time haptics, designed for safe, effective remote scanning. Clinical findings indicate image quality comparable to manual scans with improved ergonomics for operators.
Keywords: Telemedicine, haptics, ultrasound, perception‑in‑the‑loop control, clinical trial.
Read the article ↗Recommended Links
• News coverage: YouTube
• Featured article: IEEE Access
• Contact the team for collaborations or clinical pilots.