Autonomous Leader‑Follower Vehicles
Advanced autonomous driving research enabling military convoys to operate remotely or fully autonomously under extreme conditions for the Australian Army.
About the Project
This project, developed in collaboration with the Australian Army and Department of Defence, focused on designing and implementing vision‑based real‑time machine learning and deep learning systems for autonomous military trucks. Core contributions included real‑time perception, decision‑making, vehicle‑to‑vehicle networking, and safety mechanisms such as emergency braking and autonomous driving strategies.
The technology was validated in real‑world conditions and received national media attention, culminating in the prestigious Essington Lewis Award in the Support of Service sector, 2021.
Test Conditions

Test Conditions


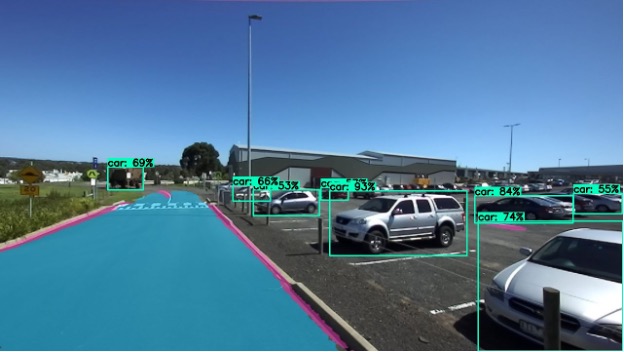
Deep Learning Perception Module
The vision‑based perception system enables real‑time object detection, tracking, and scene understanding for autonomous military convoys operating in challenging environments.